

综合制造行业解决方案
泊松Magicsim多体动力学仿真解决方案能为您带来什么
全新品质,打造高端动力学软件
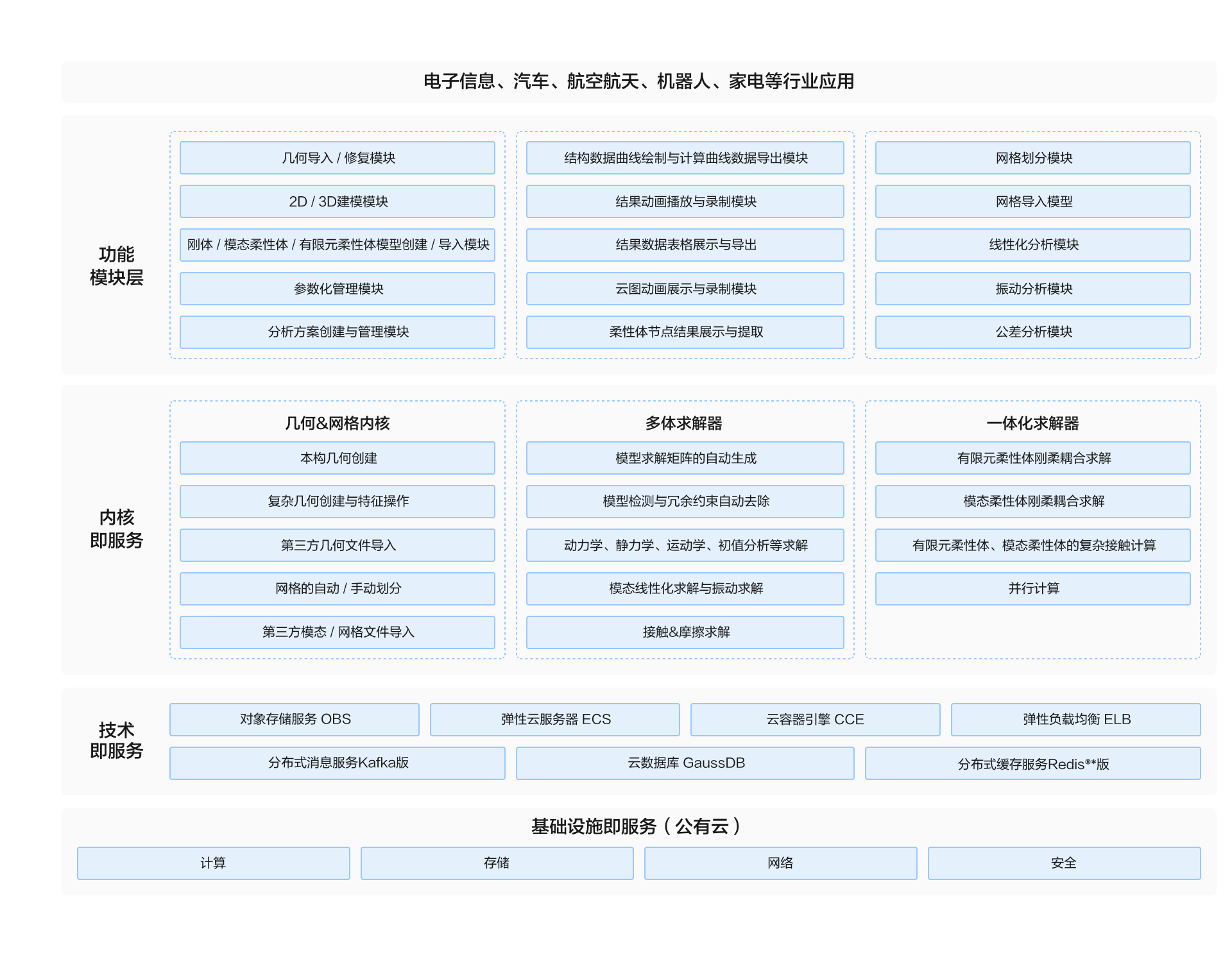
云一体化计算平台
端云协同,按需分配,全天候不受环境限制
求解器大规模异构并行
实现大模型高精度仿真
动力学一体化求解
打通结构和多体仿真壁垒,满足多种场景的仿真精度
为什么选择泊松Magicsim多体动力学仿真解决方案
为什么选择泊松Magicsim多体动力学仿真解决方案
柔性体计算效率提高50倍
与有限元法计算精度相当的同时提高计算效率
动力学效能提升10倍
与均匀撒点计算精度相当的同时提高计算效率
高速柔性旋转系统效率提高2个数量级
通过李群技术及参考节点坐标方法实现高精度高效率



满足多行业核心场景需求
满足多行业核心场景需求
高价值装备
- 新型号/改型/降成本设计,评估方案多,不在一个软件框架内
- 制造工艺、质量管控等需易用性要好,云化部署的多体工具
- 公差分析未进入计算,影响装备设计-制造-品管环节效率
- 仿真软件需高度自主可控,可靠性要强
- 支持多体动力学、结构动力学、疲劳强度、性能优化集成在一个软件框架内
- 支持多学科工作任务、工作流搭建,支持云化部署
- 支持公差分析耦合的多体结构动力学分析
- 支持私有云和公有云部署
- 实现软件一体化,使用更便捷
- 简化多模块之间的调用操作,提升效率,满足整体云化战略
- 公差分析进入仿真计算,提升效率
- 软件高度自主可控
电子信息
- 复杂接触的仿真工况,求解时间过长
- 对于复杂的情况,求解计算的精度难以保证
- 有限元柔性体过多时,求解时间过长
- 电子元器件中的非线性连接,现有多体软件不支持
- 支持接触设置库伦摩擦、粘滞摩擦等
- 支持大规模异构并行技术,多级异构并行
- 支持复杂的刚柔耦合模型大规模并行求解
- 支持有限元柔性体设置弹塑性、粘弹性、超弹性材料模型,以及材料非线性求解
- 接触求解效率大幅提升
- 异构并行技术保证了求解计算精度
- 并行求解使得计算效率大幅提升
- 功能强大,支持多种有限元柔性体模型及非线性求解
一体化解决方案
一体化解决方案
与领先的行业合作伙伴携手加速发展
与领先的行业合作伙伴携手加速发展

深圳泊松软件技术有限公司
深圳泊松软件技术有限公司(集团)总部位于深圳市龙岗区,全球已成立八个研发中心及覆盖全国的办事处,构建先进工业软件,推动高端智能制造发展
- 深圳泊松软件技术有限公司
深圳泊松软件技术有限公司(集团)总部位于深圳市龙岗区,全球已成立八个研发中心及覆盖全国的办事处,构建先进工业软件,推动高端智能制造发展

