

自动驾驶云服务 OCTOPUS-作业输入输出规范
时间:2024-05-11 16:52:37
 下载自动驾驶云服务 OCTOPUS用户手册完整版
下载自动驾驶云服务 OCTOPUS用户手册完整版
复制链接到剪贴板
分享文章到微博
分享文章到朋友圈
作业输入输出规范
用户完成自定义Rosbag转opendata算子创建,运行作业容器时Octopus平台向其中注入以下环境变量:
- rosbag_path: 作为数据源的rosbag存放路径,例如/tmp/data/20220620.bag
- yaml_path: 启动数据收集任务的yaml文件路径,例如/tmp/Octopus_data_collections.yaml
- output_dir: rosbag数据包作业运行结果输出目录,例如/tmp/output
- tmp_dir: 供用户存储作业临时文件的目录,例如/tmp/workspace
用户的作业容器需要解析rosbag,并将转换结果输出到output目录,结果示例如下:

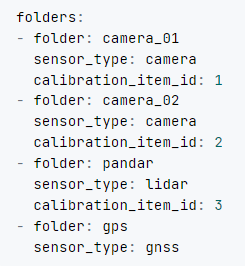
每个传感器提取的数据保存在单独的文件夹,其中camera和lidar传感器提取的样本文件必须以时间戳命名。任务结束标志文件,_SUCEESS或_FAILURE分别代表任务成功或失败。opendata_to_platform.yaml文件以yaml格式记录该opendata数据包的元数据,格式如下:

sensor_type字段标识传感器类型,可取以下值:camera、lidar、gnss、vehicle、ego_tf、object_array_vision、traffic_light_matched、tag_record、planning_trajectory、predicted_objects、control、routing_path、localization_visualization。具体定义参考数据包格式。
示例opendata_to_platform.yaml文件内容如下:
父主题: Rosbag转opendata作业
support.huaweicloud.com/usermanual-octopus/octopus-05-0018.html
看了此文的人还看了
CDN加速
GaussDB
文字转换成语音
免费的服务器
如何创建网站
域名网站购买
私有云桌面
云主机哪个好
域名怎么备案
手机云电脑
SSL证书申请
云点播服务器
免费OCR是什么
电脑云桌面
域名备案怎么弄
语音转文字
文字图片识别
云桌面是什么
网址安全检测
网站建设搭建
国外CDN加速
SSL免费证书申请
短信批量发送
图片OCR识别
云数据库MySQL
个人域名购买
录音转文字
扫描图片识别文字
OCR图片识别
行驶证识别
虚拟电话号码
电话呼叫中心软件
怎么制作一个网站
Email注册网站
华为VNC
图像文字识别
企业网站制作
个人网站搭建
华为云计算
免费租用云托管
云桌面云服务器
ocr文字识别免费版
HTTPS证书申请
图片文字识别转换
国外域名注册商
使用免费虚拟主机
云电脑主机多少钱
鲲鹏云手机
短信验证码平台
OCR图片文字识别
SSL证书是什么
申请企业邮箱步骤
免费的企业用邮箱
云免流搭建教程
域名价格


推荐文章
